地鐵盾構(gòu)施工測(cè)量技術(shù)
1.控制測(cè)量
1.1平面控制測(cè)量
1.1.1平面控制測(cè)量概述:

地鐵施工領(lǐng)域里平面控制網(wǎng)分兩級(jí)布設(shè),首級(jí)為GPS控制網(wǎng),二級(jí)為精密導(dǎo)線網(wǎng)。施工前業(yè)主會(huì)提供一定數(shù)量的GPS點(diǎn)和精密導(dǎo)線點(diǎn)以滿足施工單位的需要。施工單位需要做的是在業(yè)主給定的平面控制點(diǎn)上加密地面精密導(dǎo)線點(diǎn),然后是為了向洞內(nèi)投點(diǎn)定向而做聯(lián)系測(cè)量,最后是在洞內(nèi)為了保證隧道的掘進(jìn)而做施工控制導(dǎo)線測(cè)量。不管是地面精密導(dǎo)線還是洞內(nèi)施工控制導(dǎo)線都是精密導(dǎo)線測(cè)量,雖然邊長(zhǎng)不滿足四等導(dǎo)線的要求,但是基本上是采用四等導(dǎo)線的技術(shù)要求施測(cè),其中具體技術(shù)要求在《地下鐵道、輕軌交通工程測(cè)量規(guī)范》都有規(guī)定。
1.1.2地面平面控制測(cè)量:
在業(yè)主交接樁后,施工單位要馬上對(duì)所交樁位進(jìn)行復(fù)測(cè)。業(yè)主交樁數(shù)量有限,不一定能很好地滿足施工的需要,所以經(jīng)常要在業(yè)主所交樁的基礎(chǔ)上加密精密導(dǎo)線點(diǎn),以方便施工。特別是在始發(fā)井附近,一定要保證有足夠數(shù)量的控制點(diǎn),不少于3個(gè)。其具體技術(shù)要求在《地下鐵道、輕軌交通工程測(cè)量規(guī)范》都有規(guī)定。
1.1.3 洞內(nèi)平面控制測(cè)量
洞內(nèi)施工控制導(dǎo)線一般采用支導(dǎo)線的形式向里傳遞。但是支導(dǎo)線沒(méi)有檢核條件,很容易出錯(cuò),所以最好采用雙支導(dǎo)線的形式向前傳遞。然后在雙支導(dǎo)線的前面連接起來(lái),構(gòu)成附合導(dǎo)線的形式,以便平定測(cè)量精度。洞內(nèi)施工控制導(dǎo)線一般采用在管片最大跨度附近安裝牽制對(duì)中托架,測(cè)量起來(lái)非常方便,且可以提高對(duì)中精度,還不影響洞內(nèi)運(yùn)輸。強(qiáng)制對(duì)中托架尺寸形狀要控制好,以便可以直接安裝在管片的螺栓上面,不需要電鉆打眼安裝。由于盾構(gòu)施工一般都是雙線隧道錯(cuò)開(kāi)50環(huán)左右掘進(jìn),如果錯(cuò)開(kāi)環(huán)數(shù)很大,后面掘進(jìn)的盾構(gòu)機(jī)由于推力很大,會(huì)對(duì)前面另一個(gè)洞的導(dǎo)線點(diǎn)產(chǎn)生影響。特別是在左右線間距較小巖層很軟時(shí),影響很大,很容易導(dǎo)致測(cè)量出大錯(cuò)。還有就是如果在曲線隧道里,管片上的導(dǎo)線點(diǎn)間的邊角關(guān)系經(jīng)常受盾構(gòu)機(jī)的推力和地質(zhì)條件的影響,所以要經(jīng)常復(fù)測(cè)。
1.2高程控制測(cè)量
1.2.1高程控制測(cè)量概述:
高程控制測(cè)量主要包括地面精密水準(zhǔn)測(cè)量和高程傳遞測(cè)量及洞內(nèi)精密水準(zhǔn)測(cè)量,在廣州地鐵領(lǐng)域里的精密水準(zhǔn)測(cè)量也就是城市二等水準(zhǔn)測(cè)量。不管是地面還是洞內(nèi)都采用的是城市二等水準(zhǔn)測(cè)量。其技術(shù)要求在《地下鐵道、輕軌交通工程測(cè)量規(guī)范》都有規(guī)定。
1.2.2 地面高程控制測(cè)量
地面水準(zhǔn)測(cè)量按城市二等水準(zhǔn)的要求施測(cè)。
1.2.3洞內(nèi)高程控制測(cè)量
洞內(nèi)由于軌道上鋼枕太多,軌道下的泥水經(jīng)常蓋到鋼枕上來(lái)了,立尺很不方便,用水準(zhǔn)儀配因鋼尺測(cè)量非常麻煩。而采用全站儀三角高程測(cè)高差的辦法傳遞高程就很方便。見(jiàn)圖1。當(dāng)然此時(shí)一定要保證前后視的棱鏡高要不變,由于不需要量?jī)x器高,而是通過(guò)測(cè)量前后兩個(gè)點(diǎn)的高差來(lái)傳遞高程,所以往返觀測(cè)取平均值精度可以滿足施工的需要。這在我們侖官區(qū)間左、右線都得到證實(shí),侖官區(qū)間約1.5公里,高程貫通誤差左線是8㎜、右線都在11㎜左右。
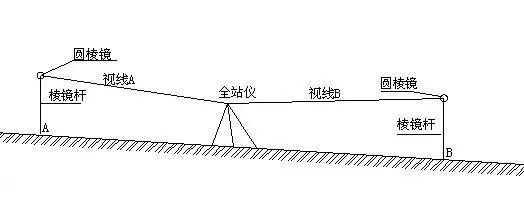
圖1全站儀三角高程測(cè)量傳遞高程
1.3聯(lián)系測(cè)量
1.3.1 定向測(cè)量
地鐵施工規(guī)定,在任何貫通面上,地下測(cè)量控制網(wǎng)的貫通中誤差,橫向不超過(guò)±50㎜,豎向不超過(guò)±25㎜。聯(lián)系測(cè)量主要有一井定向(聯(lián)系三角形定向)、兩井定向、鉛垂儀陀螺經(jīng)緯儀聯(lián)合定向、導(dǎo)線定向四中方式,其中我們施工單位一般都沒(méi)有陀螺經(jīng)緯儀,所以很少采用鉛垂儀陀螺經(jīng)緯儀聯(lián)合定向。用導(dǎo)線定向精度最好且最方便,但是用導(dǎo)線定向受始發(fā)井的長(zhǎng)度和深度制約,一般也很少用。所以一般都采用一井定向(聯(lián)系三角形定向)或兩井定向,其中用兩井定向受地面及洞內(nèi)各種因素的制約要少,很方便,但是在同樣的始發(fā)井長(zhǎng)度和深度的情況下最好采用一井定向(聯(lián)系三角形定向),這樣有利于提高井下定向的精度。這在我們侖大始發(fā)井的多次聯(lián)系測(cè)量中得到證實(shí)。雖然一井定向(聯(lián)系三角形定向)對(duì)場(chǎng)地要求較高,做起來(lái)也很麻煩,但是定向精度很有保證。聯(lián)系測(cè)量向洞內(nèi)投點(diǎn)時(shí)把點(diǎn)間距盡量拉大些,在始發(fā)井底板,最好投四個(gè)點(diǎn),保證始發(fā)井兩端都各有兩個(gè)控制點(diǎn)。且盡量保證每次聯(lián)系測(cè)量投點(diǎn)時(shí)都投在這四個(gè)點(diǎn)上。以便取多次聯(lián)系測(cè)量的加權(quán)平均值做為最終的始發(fā)控制點(diǎn)坐標(biāo)。
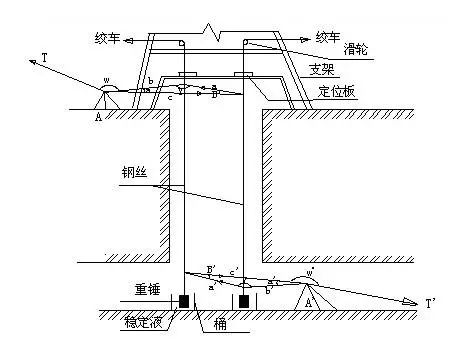
圖2一井定向聯(lián)系測(cè)量示意圖
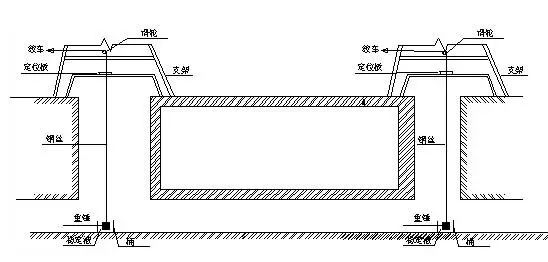
圖3兩井定向聯(lián)系測(cè)量示意圖
1.3.2 高程傳遞測(cè)量
向洞內(nèi)傳遞高程一般采用懸掛鋼尺的方法,一定要注意加溫度和尺長(zhǎng)改正,才能保證導(dǎo)入井下的水準(zhǔn)點(diǎn)的精度。如果有斜井或通道,也可以用水準(zhǔn)測(cè)量的方法向井下傳遞高程。如果全站儀的仰俯角不大的話還可以直接用全站儀三角高程測(cè)高差的辦法傳遞高程。
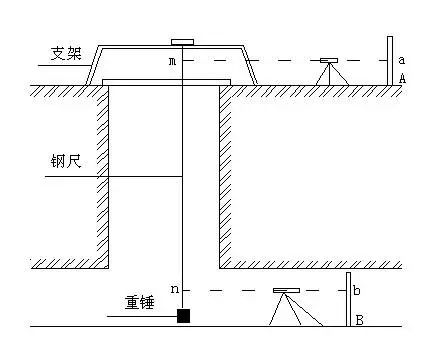
圖4鋼尺導(dǎo)入法傳遞高程
2、導(dǎo)向系統(tǒng)
2.1導(dǎo)向系統(tǒng)介紹
2.1.1VMT導(dǎo)向系統(tǒng)概述:
在掘進(jìn)隧道的過(guò)程中,為了避免隧道掘進(jìn)機(jī)(TBM)發(fā)生意外的運(yùn)動(dòng)及方向的突然改變, 必須對(duì)TBM的位置和DTA(隧道設(shè)計(jì)軸線)的相對(duì)位置關(guān)系進(jìn)行持續(xù)地監(jiān)控測(cè)量。TBM能夠按照設(shè)計(jì)路線精確地掘進(jìn),則對(duì)掘進(jìn)各個(gè)方面都有好處(計(jì)劃更精確,施工質(zhì)量更高)。這就是TBM采用“導(dǎo)向系統(tǒng)”(SLS)的原因。德國(guó)VMT公司的SLS-T系統(tǒng)就是為此而開(kāi)發(fā),該系統(tǒng)為使TBM沿設(shè)計(jì)軸線(理論軸線)掘進(jìn)提供所有重要的數(shù)據(jù)信息。SLS-T系統(tǒng)功能完美,操作簡(jiǎn)單。
2.1.2導(dǎo)向系統(tǒng)基本組成與功能
導(dǎo)向系統(tǒng)是由激光全站儀(TCA)、中央控制箱、ESL靶、黃盒子和計(jì)算機(jī)及掘進(jìn)軟件組成。其組成見(jiàn)下圖:
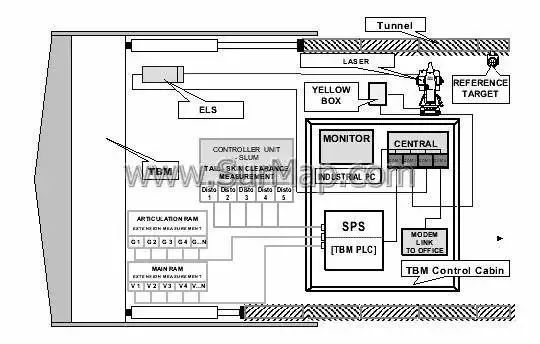
圖5導(dǎo)向系統(tǒng)組成
2.1.2.1全站儀(TCA)
具有伺服馬達(dá),可以自動(dòng)照準(zhǔn)目標(biāo)和跟蹤,并可發(fā)射激光束,主要用于后視定向,測(cè)量距離、水平角和豎直角,并將測(cè)量結(jié)果傳輸?shù)接?jì)算機(jī)。
2.1.2.2ESL靶
也稱(chēng)光靶板,是一臺(tái)智能性型的傳感器。ELS接收全站儀發(fā)射的激光束,測(cè)定水平和垂直方向的入射點(diǎn)。偏角由ELS上激光的入射角確認(rèn),坡度由該系統(tǒng)內(nèi)的傾斜儀測(cè)量。ELS在盾構(gòu)機(jī)體上的位置是確定的,即對(duì)TBM坐標(biāo)系的位置是確定的。
2.1.2.3中央控制箱
主要的接口箱,它為黃盒子(繼而為激光全站儀)及ELS靶提供電源。
2.1.2.4黃盒子
它主要為全站儀供電,保證全站儀工作和與計(jì)算機(jī)之間的通信和數(shù)據(jù)傳輸。
2.1.2.5計(jì)算機(jī)及掘進(jìn)軟件
SLS-T軟件是自動(dòng)導(dǎo)向系統(tǒng)數(shù)據(jù)處理和自動(dòng)控制的核心,通過(guò)計(jì)算機(jī)分別與全站儀和ELS通信接收數(shù)據(jù),盾構(gòu)機(jī)在線路平、剖面上的位置計(jì)算出來(lái)后,以數(shù)字和圖形在計(jì)算機(jī)上顯示出來(lái)。如下圖所示:

圖6 VMT導(dǎo)向系統(tǒng)盾構(gòu)姿態(tài)顯示
2.1.3導(dǎo)向基本原理
洞內(nèi)控制導(dǎo)線是支持盾構(gòu)機(jī)掘進(jìn)導(dǎo)向定位的基礎(chǔ)。激光全站儀安裝在位于盾構(gòu)機(jī)的右上側(cè)管片上的拖架上,后視一基準(zhǔn)點(diǎn)(后視靶棱鏡)定位后。全站儀自動(dòng)掉過(guò)方向來(lái),收尋ELS靶, ELS接收入射的激光定向光束,即可獲取激光站至ELS靶間的方位角、豎直角,通過(guò)ELS棱鏡和激光全站儀就可以測(cè)量出激光站至ELS靶間的距離。TBM的仰俯角和滾動(dòng)角通過(guò)ELS靶內(nèi)的傾斜計(jì)來(lái)測(cè)定。ELS靶將各項(xiàng)測(cè)量數(shù)據(jù)傳向主控計(jì)算機(jī),計(jì)算機(jī)將所有測(cè)量數(shù)據(jù)匯總,就可以確定TBM在全球坐標(biāo)系統(tǒng)中的精確位置。將前后兩個(gè)參考點(diǎn)的三維坐標(biāo)與事先輸入計(jì)算機(jī)的DTA(隧道設(shè)計(jì)軸線)比較,就可以顯示盾構(gòu)機(jī)的姿態(tài)了。
2.2導(dǎo)向系統(tǒng)應(yīng)用
2.2.1 始發(fā)托架和反力架定位
盾構(gòu)機(jī)初始狀態(tài)主要決定于始發(fā)托架和反力架的安裝,因此始發(fā)托架的定位在整個(gè)盾構(gòu)施工測(cè)量過(guò)程中顯得格外重要。盾構(gòu)機(jī)在曲線段始發(fā)方式通常有兩種:切線始發(fā)和割線始發(fā)。
始發(fā)托架的高程要比設(shè)計(jì)提高約1~5㎝,以消除盾構(gòu)機(jī)入洞后“栽頭”的影響。反力架的安裝位置由始發(fā)托架來(lái)決定,反力架的支撐面要與隧道的中心軸線的法線平行,其傾角要與線路坡度保持一致。
2.2.2 移站
2.2.2.1激光站人工移站
盾構(gòu)機(jī)的掘進(jìn)時(shí)的姿態(tài)控制是通過(guò)全站儀的實(shí)時(shí)測(cè)設(shè)ELS的坐標(biāo),反算出盾構(gòu)機(jī)盾首、盾尾的實(shí)際三維坐標(biāo),通過(guò)比較實(shí)測(cè)三維坐標(biāo)與DTA三維坐標(biāo),從而得出盾構(gòu)姿態(tài)參數(shù)。隨著盾構(gòu)機(jī)的往前推進(jìn),每隔規(guī)定的距離就必須進(jìn)行激光站的移站。激光站的支架用角鋼和鋼板做成可以安裝在管片螺栓的托架形似, 托架的底板采用400×400×10mm鋼板,底板中心焊上儀器連接螺栓,長(zhǎng)1㎝。采取強(qiáng)制對(duì)中,減少儀器對(duì)中誤差。托架安裝位置在隧道右側(cè)頂部不受行車(chē)的影響和破壞的地方。安裝時(shí),用水平尺大致調(diào)平托架底板后,將其固定好,然后可以安裝前視棱鏡或儀器。托架示意圖如下圖8:
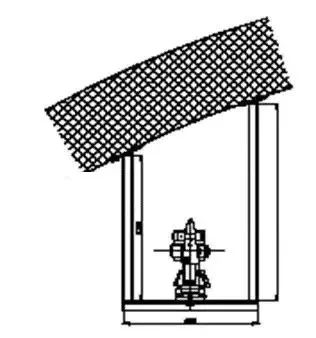
圖8 激光站的托架示意圖
一般在后視靶托架即將脫出盾構(gòu)機(jī)最后一節(jié)臺(tái)車(chē)后進(jìn)行,這樣就可以直接站在盾構(gòu)機(jī)上移站,不需要搭樓梯,既安全又方便。把前視棱鏡安裝在后視托架后,測(cè)量出棱鏡中心到托架底板的高程,然后直接從下面的測(cè)站采用極坐標(biāo)測(cè)量方式測(cè)出托架的三維坐標(biāo)。然后在后視靶托架上設(shè)站,前視直接采用極坐標(biāo)測(cè)量方式測(cè)出激光站托架的三維坐標(biāo)。然后把后視棱鏡安裝在后視靶托架上,把激光全站儀安裝在激光站托架上整平,把黃盒子固定好,給全站儀接上電源,手動(dòng)把全站儀瞄準(zhǔn)后視棱鏡,瞄準(zhǔn)的精度在±10㎝左右,然后把全站儀電源關(guān)閉。接著在主空室里,啟動(dòng)SLS-T,按“編輯器—F2”進(jìn)入編輯器窗口,進(jìn)入激光站編輯窗口,輸入激光全站儀中心和后視靶棱鏡中心的三維坐標(biāo)。按“保存”鍵保存,然后關(guān)閉選自.投標(biāo)書(shū)代寫(xiě)網(wǎng) yipai178.com 編輯器窗口。再按“定位—F5”鍵,給激光全站儀定位。定位完成后,再按“方位檢查—F5”鍵,檢查激光站和后視棱鏡的坐標(biāo)有沒(méi)有錯(cuò)誤。如果超限,將會(huì)顯示差值,如果不超限,那么將不顯示。最后再按“推進(jìn)—F4”就完成了激光站的人工移站的全過(guò)程。
2.2.2.2激光站自動(dòng)移站
VMT導(dǎo)向軟件SLS—T有激光站自動(dòng)移站功能,移站的過(guò)程除了托架和全站儀及后視棱鏡的安裝,其它測(cè)量工作都可以通過(guò)此功能完成。
操作流程為:
程序的啟動(dòng)及后續(xù)測(cè)量工作在主控室進(jìn)行。此時(shí)SLS-T軟件處于“管片拼裝”狀態(tài),按功能鍵F3,關(guān)閉測(cè)量后,通過(guò)功能鍵“激光站移站—F6”來(lái)啟動(dòng)程序。在初始窗口中,按下按鈕“測(cè)量開(kāi)始—F2”,啟動(dòng)方位檢測(cè)程序。方位檢測(cè)被成功的執(zhí)行后,顯示檢測(cè)結(jié)果,在得到理想的結(jié)果后,按下F2確認(rèn)后方位檢測(cè)的結(jié)果。在測(cè)定新激光站點(diǎn)坐標(biāo)前,事先在信息輸入窗口中輸入如下信息:水平與垂直方向上偏移的近似值及新激光站點(diǎn)的大致里程;當(dāng)前棱鏡的高度及儀器的高度;新站點(diǎn)的點(diǎn)位編碼。在信息輸入窗口下,按下F2鍵啟動(dòng)程序。全站儀自動(dòng)搜索到前視棱鏡(即新激光站點(diǎn))后,自動(dòng)瞄準(zhǔn)棱鏡進(jìn)行測(cè)量。屏幕顯示計(jì)算出來(lái)的新激光站點(diǎn)坐標(biāo)。在測(cè)定新激光站坐標(biāo)時(shí),為避免獲得錯(cuò)誤的數(shù)據(jù),須遮蓋住其他的反射棱鏡。新激光站點(diǎn)的坐標(biāo)測(cè)定后,將全站儀和后視棱鏡轉(zhuǎn)移到新的位置。全站儀和后視棱鏡轉(zhuǎn)移到新的位置后,主控室按功能鍵F2進(jìn)行確認(rèn),新的信息窗口會(huì)顯示新激光站點(diǎn)三維坐標(biāo),然后將新激光站點(diǎn)上的全站儀手動(dòng)轉(zhuǎn)向新的后視點(diǎn)即原先的激光站,按下F2,重新調(diào)整定位全站儀上的刻度。成功執(zhí)行上述的步驟后,出現(xiàn)一新的信息窗口。通過(guò)按下F2功能鍵完成激光站移站程序。
2.2.2.3激光站的人工檢查
在推進(jìn)的過(guò)程中,可能會(huì)由于安裝托架的管片出現(xiàn)沉降、位移或托架被碰動(dòng),使激光站點(diǎn)或后視靶的位置發(fā)生變化,從而全站儀測(cè)得錯(cuò)誤的盾構(gòu)機(jī)姿態(tài)信息。為了保證激光全站儀的準(zhǔn)確定位,在SLS-T軟件的狀態(tài)為“推進(jìn)”時(shí),通過(guò)功能鍵F5對(duì)全站儀的定位進(jìn)行檢查,如果測(cè)得的后視靶的值超過(guò)了在編輯器中設(shè)定的限值時(shí),需要對(duì)激光站進(jìn)行人工檢查。檢查方法是利用洞內(nèi)精密導(dǎo)線點(diǎn)對(duì)激光站點(diǎn)及后視靶點(diǎn)位置進(jìn)行測(cè)量,重新確定兩點(diǎn)的三維坐標(biāo)。設(shè)站導(dǎo)線點(diǎn)盡量選擇在右側(cè)管片側(cè)壁上的強(qiáng)制對(duì)中導(dǎo)線點(diǎn),這樣建測(cè)站時(shí)能夠一次建站測(cè)算出兩個(gè)點(diǎn)位的坐標(biāo),避免誤差的積累。當(dāng)不滿足上述建站條件時(shí),從隧道內(nèi)主控制導(dǎo)線點(diǎn)引測(cè)至后視靶托架上,在托架上建立測(cè)站,測(cè)定激光站點(diǎn)的三維坐標(biāo)。
2.3導(dǎo)向系統(tǒng)維護(hù)與檢修
2.3.1導(dǎo)向系統(tǒng)維護(hù)
2.3.1.1ELS靶:
1.由于ELS靶的安裝位置附近有注漿管,在注漿的過(guò)程中很容易被人碰到,而前面板是玻璃作成的,容易被破壞特別是ELS棱鏡更是容易被工人碰動(dòng),在沒(méi)有對(duì)ELS靶進(jìn)行保護(hù)之前,我們的ELS棱鏡曾多次被工人碰掉,對(duì)掘進(jìn)造成不小影響。后來(lái)我們?cè)贓LS靶的四周用4塊木板保護(hù)起來(lái)后,就再也沒(méi)有人碰掉ELS棱鏡了;2.ELS靶前面板保護(hù)屏要經(jīng)常擦干凈,防止激光接收靶接收的信號(hào)太弱;3. ELS靶附近不能有強(qiáng)光,強(qiáng)光會(huì)使VMT姿態(tài)顯示不正常。
2.3.1.2電纜:
在前期我們按常規(guī)安裝好導(dǎo)向系統(tǒng)傳輸電纜卷后,在盾構(gòu)機(jī)向前推進(jìn)的過(guò)程中,經(jīng)常把傳輸電纜拉斷。嚴(yán)重的時(shí)候,甚至把激光站托架都拉動(dòng),把黃盒子拉掉,還威脅到激光全站儀的安全,極大地破壞了導(dǎo)向系統(tǒng)。為了克服這個(gè)問(wèn)題,我們采用了三種辦法。1.把在導(dǎo)向系統(tǒng)的傳輸電纜卷安裝在激光站的前面,這樣盾構(gòu)機(jī)推進(jìn)時(shí),電纜一直是順著拉;2.在盾構(gòu)機(jī)電纜經(jīng)過(guò)的地方用安全網(wǎng)覆蓋,把盾構(gòu)機(jī)上的各個(gè)突起物蓋住,防止勾斷電纜;3.通過(guò)加強(qiáng)平時(shí)的巡視,經(jīng)常整理傳輸電纜。通過(guò)以上辦法后,電纜再也沒(méi)有被拉斷過(guò)。
2.3.1.3激光站和黃盒子:
1.在始發(fā)時(shí),由于激光站托架是安裝在豎井里面,激光全站儀和黃盒子容易被雨水淋濕,一定要加以保護(hù)。2.在隧道里面時(shí),由于工人沖洗管片時(shí),容易被水澆濕,需要經(jīng)常提醒掘進(jìn)工人。激光全站儀和黃盒子要經(jīng)常擦干凈、涼干。
2.3.2導(dǎo)向系統(tǒng)故障處理
2.3.2.1ELS靶:
1. ELS靶的前面板被注漿的漿液覆蓋,ELS靶接收到的激光信號(hào)不夠強(qiáng),導(dǎo)致不工作,處理辦法是把前面板的覆蓋物清理干凈;2.ELS靶的前面板附近有很強(qiáng)的光源,嚴(yán)重干擾了ELS靶對(duì)激光信號(hào)的接收,導(dǎo)致VMT顯示不正常,處理辦法是把光源移開(kāi);3.ELS靶的溫度太高,導(dǎo)致ELS靶不工作,處理辦法是用濕毛巾冷敷ELS靶降溫。4.ELS靶和激光站之間空間被人或其他東西擋了,導(dǎo)致ELS靶接收不到激光信號(hào),處理辦法把障礙物移開(kāi),如果移不動(dòng),就移激光站,把激光站向前移到適當(dāng)位置。
2.3.2.2激光全站儀:
1.激光全站儀被水淋了,不能正常工作,處理辦法是把全站儀卸下來(lái),擦干凈涼干;2. 全站儀的氣泡偏了,VMT顯示姿態(tài)偏差變大,處理辦法是把全站儀再次整平,然后做一下全站儀方位檢查,如果檢查超限,就需要重新測(cè)定激光站的坐標(biāo),千萬(wàn)不要在不測(cè)定變動(dòng)后的激光站坐標(biāo)的情況下重新定位測(cè)量。這樣只能誤導(dǎo)VMT導(dǎo)向系統(tǒng)給出錯(cuò)誤導(dǎo)向。如果檢查未超限,就直接重新整平儀器,重新定位測(cè)量。3.全站儀在定位時(shí)沒(méi)有關(guān)掉全站儀的電源,定不了位,處理辦法是把全站儀的電源關(guān)掉,重新啟動(dòng)定位程序。4.全站儀找不到ELS靶,處理辦法是首先看全站儀與ELS靶之間的空間有沒(méi)有障礙物擋,如果有,將其移開(kāi)。如果還收尋不到,就人工測(cè)量出激光站至ELS靶的方位,手動(dòng)輸入到激光站編輯器里的方位當(dāng)前值里。
2.3.2.3電纜:
電纜被拉斷,導(dǎo)致不能傳輸數(shù)據(jù)或電流。處理辦法是沿著線路一直排查,直到找到斷裂出,把電纜接好。
3、盾構(gòu)姿態(tài)人工復(fù)測(cè)
3.1盾構(gòu)姿態(tài)人工檢測(cè)概述
在盾構(gòu)施工的過(guò)程中,為了保證導(dǎo)向系統(tǒng)的正確性和可靠性,在盾構(gòu)機(jī)掘進(jìn)一定的長(zhǎng)度或時(shí)間之后,應(yīng)通過(guò)洞內(nèi)的獨(dú)立導(dǎo)線獨(dú)立的檢測(cè)盾構(gòu)機(jī)的姿態(tài),即進(jìn)行盾構(gòu)姿態(tài)的人工檢測(cè)。盾構(gòu)施工中所用到的坐標(biāo)系統(tǒng)有三種:全球坐標(biāo)系統(tǒng)、 DTA坐標(biāo)系、TBM坐標(biāo)系。
3.2盾構(gòu)機(jī)參考點(diǎn)的測(cè)量
在進(jìn)行盾構(gòu)機(jī)組裝時(shí),VMT公司的測(cè)量工程師就已經(jīng)在盾體上布置了盾構(gòu)姿態(tài)測(cè)量的參考點(diǎn)(共21個(gè)),如圖9。并精確測(cè)定了各參考點(diǎn)在TBM坐標(biāo)系中的三維坐標(biāo)。我們?cè)谶M(jìn)行盾構(gòu)姿態(tài)的人工檢測(cè)時(shí),可以直接利用VMT公司提供的相關(guān)數(shù)據(jù)來(lái)進(jìn)行計(jì)算。其中盾體前參考點(diǎn)及后參考點(diǎn)是虛擬的,實(shí)際是不存在的):
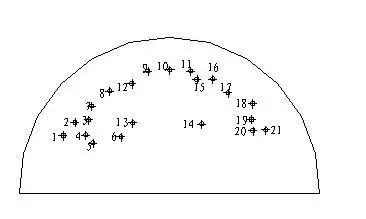
圖9 S267盾構(gòu)機(jī)參考點(diǎn)的布置
盾構(gòu)姿態(tài)人工檢測(cè)的測(cè)站位置選在盾構(gòu)機(jī)第一節(jié)臺(tái)車(chē)的連接橋上,此處通視條件非常理想,而且很好架設(shè)全站儀。只要在連接橋上的中部焊上一個(gè)全站儀的連接螺栓就可以了。測(cè)量時(shí),應(yīng)根據(jù)現(xiàn)場(chǎng)條件盡量使所選參考點(diǎn)之間連線距離大一些,以保證計(jì)算時(shí)的精度,最好保證左、中、右各測(cè)量一兩個(gè)點(diǎn),這樣就可以提高測(cè)量計(jì)算的精度。例如在我們?cè)谶x擇S267盾構(gòu)機(jī)的參考點(diǎn)時(shí),即是選擇的1、10、21三點(diǎn)作為盾構(gòu)姿態(tài)人工檢測(cè)的參考點(diǎn)。
3.3盾構(gòu)姿態(tài)的計(jì)算
3.3.1盾構(gòu)姿態(tài)的計(jì)算原理
盾構(gòu)機(jī)作為一個(gè)近似的圓柱體,在開(kāi)挖掘進(jìn)過(guò)程中我們不能直接測(cè)量其刀盤(pán)的中心坐標(biāo),只能用間接法來(lái)推算出刀盤(pán)中心的坐標(biāo)。
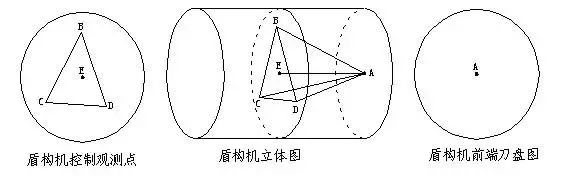
圖10盾構(gòu)姿態(tài)計(jì)算原理圖
如圖A點(diǎn)是盾構(gòu)機(jī)刀盤(pán)中心,E是盾構(gòu)機(jī)中體斷面的中心點(diǎn),即AE連線為盾構(gòu)機(jī)的中心軸線,由A、B、C、D、四點(diǎn)構(gòu)成一個(gè)四面體,測(cè)量出B、C、D 三個(gè)角點(diǎn)的三維坐標(biāo)(xi,yi, zi),根據(jù)三個(gè)點(diǎn)的三維坐標(biāo)(xi, yi, zi)分別計(jì)算出LAB, LAC, LAD, LBC, LBD,LCD, 四面體中的六條邊長(zhǎng),作為以后計(jì)算的初始值,在盾構(gòu)機(jī)掘進(jìn)過(guò)程中Li是不變的常量,通過(guò)對(duì)B、C、D三點(diǎn)的三維坐標(biāo)測(cè)量來(lái)計(jì)算出A點(diǎn)的三維坐標(biāo)。同理,B、C、D、E四點(diǎn)也構(gòu)成一個(gè)四面體,相應(yīng)地求得E點(diǎn)的三維坐標(biāo)。由A、E兩點(diǎn)的三維坐標(biāo)就能計(jì)算出盾構(gòu)機(jī)刀盤(pán)中心的水平偏航,垂直偏航,由B、C、D三點(diǎn)的三維坐標(biāo)就能確定盾構(gòu)機(jī)的仰俯角和滾動(dòng)角,從而達(dá)到檢測(cè)盾構(gòu)機(jī)姿態(tài)的目的。
3.3.2通過(guò)AutoCAD作圖求解盾構(gòu)姿態(tài)
通過(guò)幾何解算盾構(gòu)姿態(tài)方法的缺點(diǎn)是在內(nèi)業(yè)計(jì)算時(shí),如果用人工手算,其工作量相當(dāng)大,而且難免出錯(cuò),因此我們?cè)谶M(jìn)行解算時(shí),是利用AutoCAD進(jìn)行作圖求解,相對(duì)于用幾何方法解算,速度要快很多。其操作過(guò)程如下:
首先是把隧道中心線(三維坐標(biāo))通過(guò)建立CAD腳本文件輸入CAD中,這個(gè)工作一個(gè)工地只要做一次。然后是把所測(cè)參考點(diǎn)1、10、21的坐標(biāo)(三維)輸入到CAD里面。分別以1、10、21為球心,以1、10、21到前點(diǎn)的距離為半徑畫(huà)球,求三個(gè)球的交集。用鼠標(biāo)左鍵點(diǎn)擊交集后的體,就可以找到兩個(gè)端點(diǎn),這兩個(gè)端點(diǎn)到1、10、21的距離就分別等于1、10、21到前點(diǎn)的距離。然后根據(jù)盾構(gòu)掘進(jìn)的方向,舍去其中一個(gè)點(diǎn)。同樣方法把后點(diǎn)在CAD里畫(huà)出來(lái)。由于后點(diǎn)通過(guò)求交集的方法求出的兩個(gè)端點(diǎn)距離很近,通過(guò)盾構(gòu)機(jī)的掘進(jìn)方向很南判斷,于是通過(guò)前點(diǎn)到后點(diǎn)的距離是3.9491米來(lái)判斷。畫(huà)出前后點(diǎn)的位置后,通過(guò)前后點(diǎn)向隧道中線做垂線,通過(guò)測(cè)量垂線在水平和垂直方向上偏離值來(lái)求解盾構(gòu)機(jī)前后點(diǎn)的姿態(tài)。盾構(gòu)機(jī)的坡度=![]()
(L為盾體前后參考點(diǎn)連線長(zhǎng)度)。根據(jù)測(cè)量平差理論可知,實(shí)際測(cè)量時(shí),需要觀測(cè)至少4個(gè)點(diǎn)位以上,觀測(cè)的參考點(diǎn)越多,多余觀測(cè)就越多,因此計(jì)算的精度就越高。比較VMT導(dǎo)向系統(tǒng)測(cè)得的盾構(gòu)姿態(tài)值和人工檢測(cè)的盾構(gòu)姿態(tài)值,其精度基本上能達(dá)到±5mm之內(nèi)。
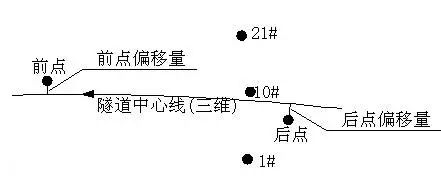
圖11盾構(gòu)姿態(tài)CAD計(jì)算示意圖
4、管環(huán)檢測(cè)
4.1管環(huán)測(cè)量概述
由于在盾構(gòu)掘進(jìn)過(guò)程中,剛拼裝的管環(huán)還沒(méi)有來(lái)得及注入雙液漿加固,因此還不穩(wěn)定,經(jīng)常發(fā)生管環(huán)位移現(xiàn)象。有時(shí)位移量很大,特別是上浮,位移量大常常引起管環(huán)限界超限。因?yàn)榈罔F施工中規(guī)定,拼裝好的管環(huán)允許最大限界值是±10㎝。為了防止管環(huán)的侵限,我們首先是提高控制測(cè)量的精度外,其次是提高導(dǎo)線系統(tǒng)的精度,最后就是通過(guò)每天的管環(huán)測(cè)量,實(shí)測(cè)出管環(huán)的位移趨勢(shì),采取措施盡量減小位移量。當(dāng)然,管環(huán)測(cè)量還起到復(fù)核導(dǎo)向系統(tǒng)的作用。
4.2管環(huán)測(cè)量方法
根據(jù)管環(huán)的內(nèi)徑是2.7米, 采用鋁合金制作一鋁合金尺,鋁合金尺長(zhǎng)3.8米(可根據(jù)實(shí)際情況調(diào)整長(zhǎng)度)。在鋁合金尺正中央,貼上一個(gè)反射貼片。根據(jù)管環(huán)、鋁合金尺、反射貼片的尺寸,就可以計(jì)算出實(shí)際上的管環(huán)中心與鋁合金尺上反射貼片中心的高差。測(cè)量時(shí),首先用水平尺把鋁合金尺精確整平,然后用全站儀測(cè)量出鋁合金尺上反射貼片中心的三維坐標(biāo),就可以推算出實(shí)際的管環(huán)中心的三維坐標(biāo)。每次管環(huán)測(cè)量時(shí),應(yīng)重疊5環(huán)已經(jīng)穩(wěn)定了的管環(huán),這樣就可以消除測(cè)錯(cuò)的可能。
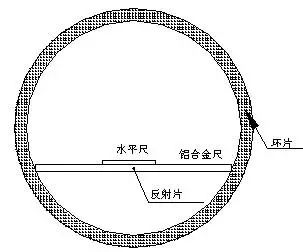
圖12.管環(huán)測(cè)量示意圖
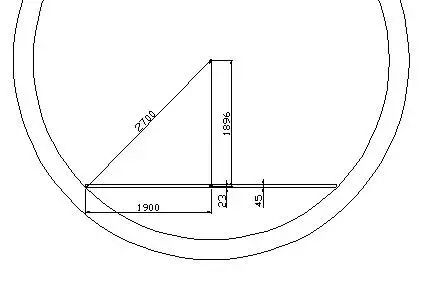
圖13管環(huán)中心標(biāo)高推算示意圖
4.3管環(huán)姿態(tài)計(jì)算
管環(huán)測(cè)量時(shí),把管環(huán)檢測(cè)外業(yè)數(shù)據(jù)直接存儲(chǔ)在全站儀的內(nèi)存里。回到辦公室后,通過(guò)徠卡測(cè)量辦公室軟件(Leica Survey –Office),將全站儀里面的管環(huán)測(cè)量外業(yè)數(shù)據(jù)下載,然后將其復(fù)制到EXCLE表格中編輯成CAD認(rèn)識(shí)的三維坐標(biāo),然后將三維坐標(biāo)數(shù)據(jù)復(fù)制到記事本程序里面保存,文件的后綴名必須是.SCR,如“管環(huán)檢測(cè)外業(yè)數(shù)據(jù).SCR”。這樣就把管環(huán)檢測(cè)的外業(yè)數(shù)據(jù)編輯成了CAD的畫(huà)點(diǎn)腳本文件。通過(guò)CAD的腳本功能,就很方便快節(jié)地在CAD里面把點(diǎn)畫(huà)出來(lái)。
打開(kāi)AutoCAD,在模型狀態(tài)下(一定要關(guān)閉“對(duì)象捕捉”命令),打開(kāi)菜單欄的“工具(T)”選項(xiàng),在下拉子菜單中選擇“運(yùn)行腳本(R…)”,或者在命令行中輸入“.SCR”,兩種方式都是運(yùn)行腳本,AutoCAD便查找腳本文件。操作者找到要調(diào)用的腳本文件“管環(huán)檢測(cè)外業(yè)數(shù)據(jù).SCR” 后,直接打開(kāi)它。AutoCAD 便自動(dòng)把點(diǎn)畫(huà)出來(lái)了。如下圖14。
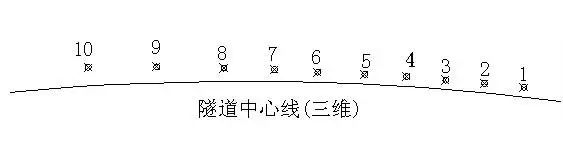
圖14 管環(huán)姿態(tài)計(jì)算示意圖
點(diǎn)位畫(huà)出來(lái)后,就可以在CAD里通過(guò)查詢命令直接量出管環(huán)的水平和垂直姿態(tài)了。通過(guò)以上管環(huán)的測(cè)量和計(jì)算方法,解決了管環(huán)檢測(cè)數(shù)據(jù)量大,計(jì)算難,測(cè)量時(shí)間長(zhǎng)的問(wèn)題。大大提高管環(huán)檢測(cè)的效率和準(zhǔn)確度。
5、結(jié)束語(yǔ)
由于盾構(gòu)機(jī)的VMT導(dǎo)向系統(tǒng)必須有控制測(cè)量的支持才能運(yùn)作,所以控制測(cè)量還是盾構(gòu)隧道測(cè)量的基礎(chǔ)。為了保證隧道的順利貫通,我們首先要做好控制測(cè)量,然后就是保證導(dǎo)向系統(tǒng)的正常運(yùn)行,定期對(duì)盾構(gòu)姿態(tài)進(jìn)行人工檢測(cè),保證導(dǎo)向系統(tǒng)的正確可靠。加強(qiáng)管環(huán)姿態(tài)檢測(cè),及時(shí)發(fā)現(xiàn)管環(huán)的位移趨勢(shì),防止管環(huán)安裝侵限。加強(qiáng)管環(huán)姿態(tài)的檢測(cè)同時(shí)也是對(duì)導(dǎo)向系統(tǒng)的復(fù)核。由于筆者才疏學(xué)淺,文中難免有不周全之處,懇請(qǐng)各位提出批評(píng)與建議。
- 上一篇:花籃拉桿工具式懸挑架施工工法
- 下一篇:建筑工程質(zhì)量通病合集:人防工程篇
